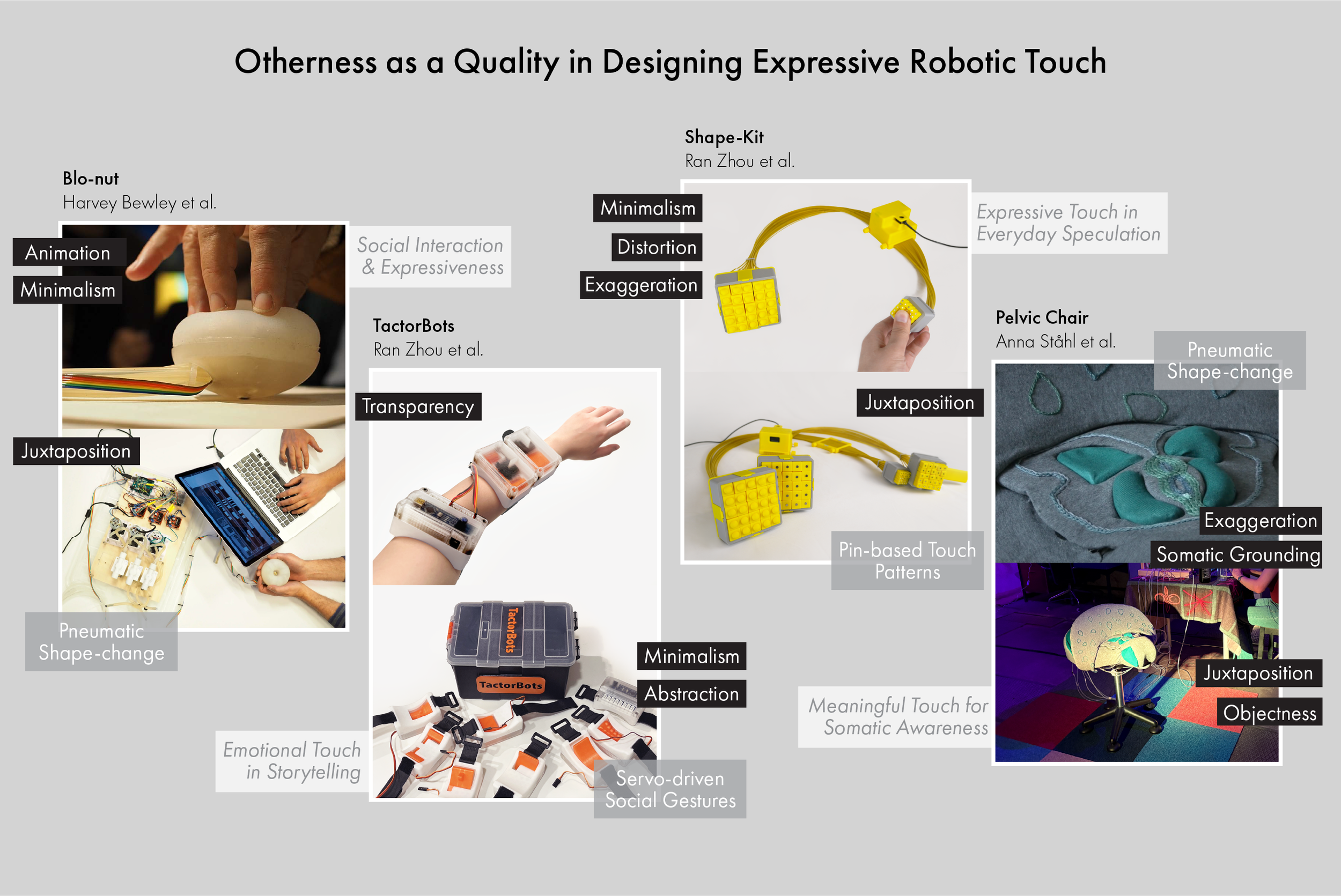
Otherness as a Quality in Designing Expressive Robotic Touch
Haptic technologies have advanced rapidly, yet exploration of robotic touch remains dominated by replicating realistic environmental cues or hand gestures, which narrows the design space and risks social resistance. This paper argues for alternatives: grounded in the notion of “otherness” from human–robot interaction, we propose treating robotic touch’s inherent otherness as a design quality. Instead of being a limitation in pursuing realism, otherness can be embraced to elicit ambiguity and provoke alternative interpretations, fostering expressive and evocative robotic touch design. To develop this perspective, we analyze inspirational art and design precedents and four design research cases through a reflective Research through Design approach. Through this analysis, we articulate a set of design languages structured around why otherness matters for touch meaning-making, how it can be shaped through design strategies, and where it can be embedded within robotic touch systems. We conclude by reflecting on the tensions and risks involved in designing robotic touch with otherness in mind.
Ran Zhou, Laurens Boer, Daniel Leithinger, and Madeline Balaam. 2026. Otherness as a Quality in Designing Expressive Robotic Touch. In Proceedings of the 2026 Designing Interactive Systems Conference (DIS '26). Association for Computing Machinery, New York, NY, USA, 3316–3333.
https://doi.org/10.1145/3800645.3812880
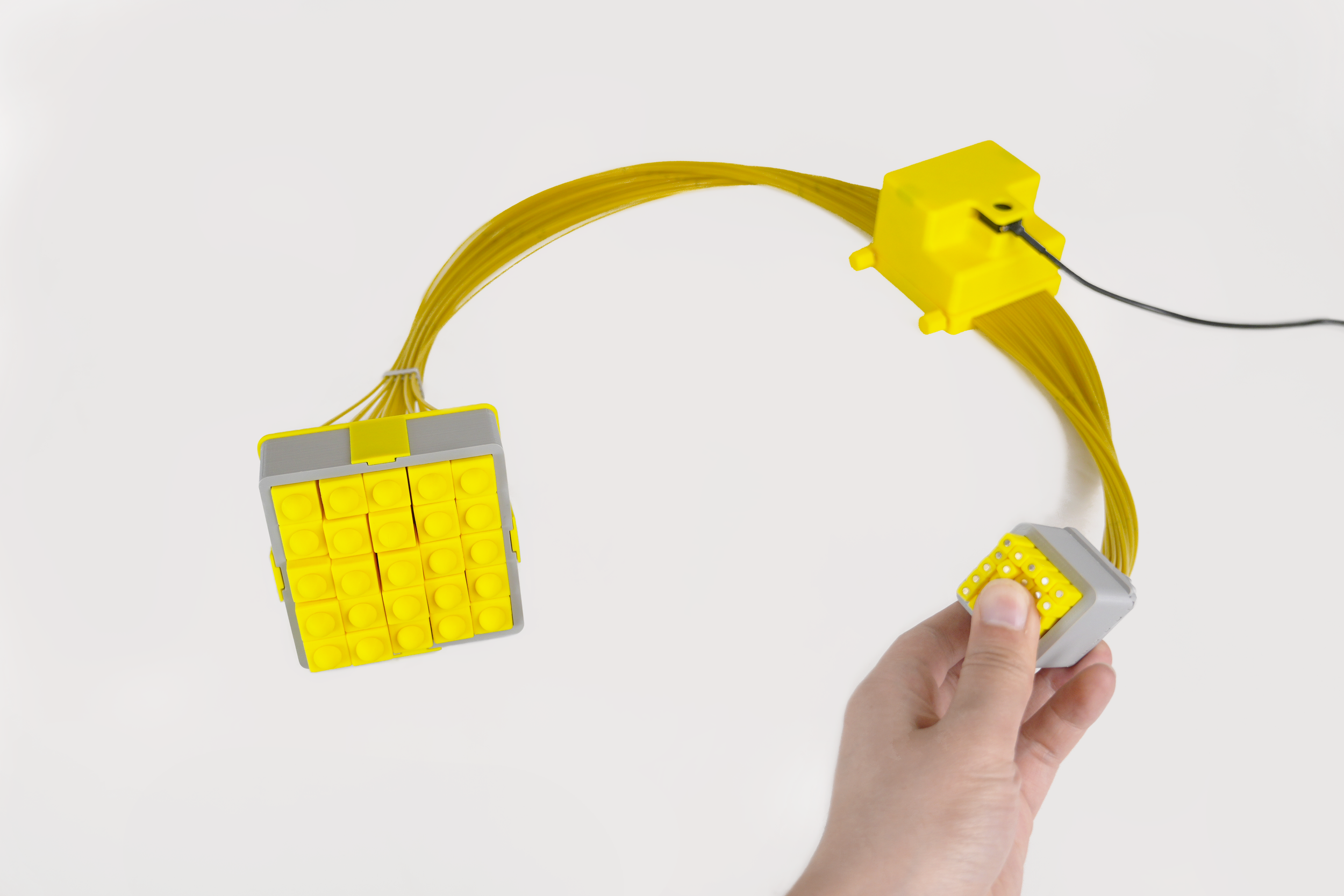
Shape-Kit: A Design Toolkit for Crafting On-Body Expressive Haptics
Driven by the vision of everyday haptics, the HCI community is advocating for “design touch first” and investigating “how to touch well.” However, a gap remains between the exploratory nature of haptic design and technical reproducibility. We present Shape-Kit, a hybrid design toolkit embodying our “crafting haptics” metaphor, where hand touch is transduced into dynamic pin-based sensations that can be freely explored across the body. An ad-hoc tracking module captures and digitizes these patterns. Our study with 14 designers and artists demonstrates how Shape-Kit facilitates sensorial exploration for expressive haptic design. We analyze how designers collaboratively ideate, prototype, iterate, and compose touch experiences and show the subtlety and richness of touch that can be achieved through diverse crafting methods with Shape-Kit. Reflecting on the findings, our work contributes key insights into haptic toolkit design and touch design practices centered on the “crafting haptics” metaphor. We discuss in-depth how Shape-Kit’s simplicity, though remaining constrained, enables focused crafting for deeper exploration, while its collaborative nature fosters shared sense-making of touch experiences.
Ran Zhou, Jianru Ding, Chenfeng Gao, Wanli Qian, Benjamin Erickson, Madeline Balaam, Daniel Leithinger, and Ken Nakagaki. 2025. Shape-Kit: A Design Toolkit for Crafting On-Body Expressive Haptics. In Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems (CHI '25). Association for Computing Machinery, New York, NY, USA, Article 504, 1–26. https://doi.org/10.1145/3706598.3713981 Best Paper Award Honorable Mention
TactorBots: A Haptic Design Toolkit for Out-of-lab Exploration of Emotional Robotic Touch
Emerging research has demonstrated the viability of emotional communication through haptic technology inspired by interpersonal touch. However, the meaning-making of artificial touch remains ambiguous and contextual. We see this ambiguity caused by robotic touch’s "otherness" as an opportunity for exploring alternatives. To empower emotional haptic design in longitudinal out-of-lab exploration, we devise TactorBots, a design toolkit consisting of eight wearable hardware modules for rendering robotic touch gestures controlled by a web-based application. We deployed TactorBots to 13 designers and researchers to validate its functionality, characterize its design experience, and analyze what, how, and why alternative perceptions, practices, contexts, and metaphors would emerge in the experiment. We provide suggestions for designing future toolkits and field studies based on our experiences. Reflecting on the findings, we derive design implications for further enhancing the ambiguity and shifting the mindsets to expand the design space.
Ran Zhou, Zachary Schwemler, Akshay Baweja, Harpreet Sareen, Casey Lee Hunt, and Daniel Leithinger. 2023. TactorBots: A Haptic Design Toolkit for Out-of-lab Exploration of Emotional Robotic Touch . In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI ’23), April 23–28, 2023, Hamburg, Germany. ACM, New York, NY, USA, 19 pages. https://doi.org/10.1145/3544548.3580799
EmotiTactor: Exploring How Designers Approach Emotional Robotic Touch
In this work, we bring designers into the exploration of emotional robotic touch, discuss their design decisions and reflect on their insights. Prior psychology findings show humans can communicate distinct emotions solely through touch. We hypothesize that similar effects might also be applicable to robotic touch. To enable designers to easily generate and modify various types of affective touch for conveying emotions (e.g., anger, happiness, etc.), we developed a platform consisting of a robotic tactor interface and a software design tool. When conducting an elicitation study with eleven interaction designers, we discovered common patterns in their generated tactile sensations for each emotion. We also illustrate the strategies, behaviors, and metaphors that the designers deployed in the design process. Our findings uncover that the “otherness” of robotic touch broadens the design possibilities of emotional communication beyond mimicking interpersonal touch.
Ran Zhou, Harpreet Sareen, Yufei Zhang, and Daniel Leithinger. 2022. EmotiTactor: Exploring How Designers Approach Emotional Robotic Touch. In Designing Interactive Systems Conference (DIS '22). Association for Computing Machinery, New York, NY, USA, 1330–1344. https://doi.org/10.1145/3532106.3533487Best Pictorial Award Honorable Mention
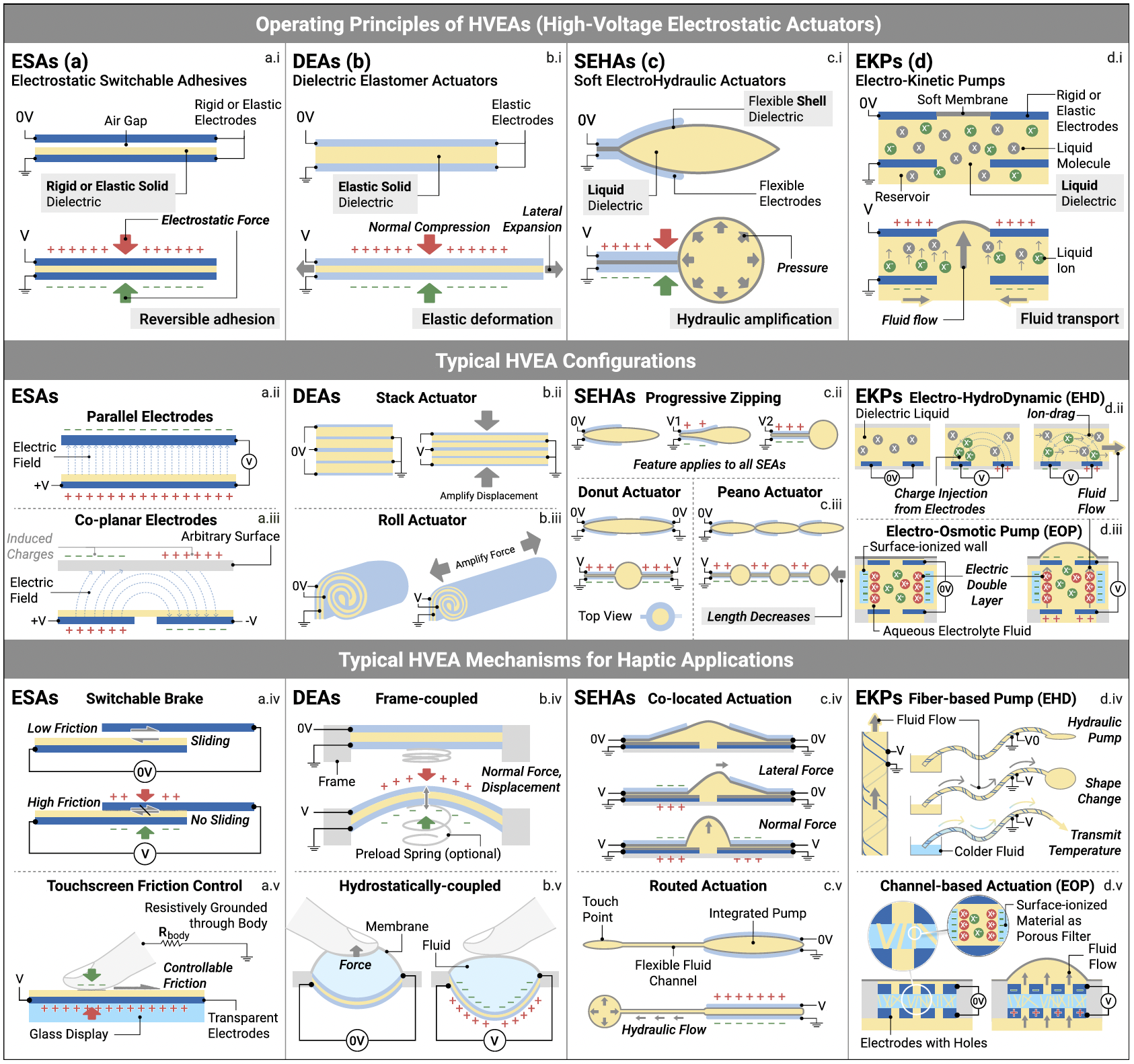
Power from Potential: A Survey of Electrostatic Actuators for Haptics
As haptic interfaces integrate more seamlessly into wearables and everyday environments, they increasingly require actuators that are soft, thin, silent, and energy efficient. However, conventional motors and temperature-responsive polymers often struggle to deliver these properties due to their bulky form factors and high power consumption. High-Voltage Electrostatic Actuators (HVEAs), which generate force by applying an electric field to localized charge concentrations using high voltages and ultra-low currents, have recently emerged as a compelling alternative due to their fast, silent, and low-power operation within highly customizable and compliant form factors. This paper presents a focused review of HVEAs for haptics, examining four major classes: electrostatic switchable adhesives, dielectric elastomer actuators, soft electrohydraulic actuators, and electrokinetic pumps. For each class, we describe their mechanisms that enable haptic output; characterize their bandwidths, force densities, and spatial scalability; and evaluate their versatility for rendering cutaneous and kinesthetic feedback across wearable and world-grounded interfaces. Through this cross-technology analysis, we identify common design constraints and emerging strategies for improving ergonomics, streamlining fabrication, and integrating self-sensing. We conclude by outlining where HVEAs are uniquely positioned to advance haptic interaction and highlighting key research directions needed to translate these technologies into practical systems.
Ahad M. Rauf*, Ran Zhou*, Eric Acome, Madeline Balaam, Sean Follmer, Teng Han, Craig Shultz, Daniel Leithinger.
2026. Power from Potential: A Survey of Electrostatic Actuators for Haptics. In IEEE Transactions on Haptics, doi: 10.1109/TOH.2026.3708136. (*equal contribution)
Wizard of Props: Mixed Reality Prototyping with Physical Props to Design Responsive Environments
Driven by the vision of future responsive environments, where everyday surroundings can perceive human behaviors and respond through intelligent robotic actuation, we propose Wizard of Props (WoP): a human-centered design workflow for creating expressive, implicit, and meaningful interactions. This collaborative experience prototyping approach integrates full-scale physical props with Mixed Reality (MR) to support ideation, prototyping, and rapid testing of responsive environments. We present two design explorations that showcase our investigations of diverse design solutions based on varying technology resources, contextual considerations, and target audiences. Design Exploration One focuses on mixed environment building, where we observe fluid prototyping methods. In Design Exploration Two, we explore how novice designers approach WoP, and illustrate their design ideas and behaviors. Our findings reveal that WoP complements conventional design methods, enabling intuitive body-storming, supporting flexible prototyping fidelity, and fostering expressive environment-human interactions through in-situ improvisational performance.
Yuzhen Zhang*, Ruixiang Han*, Ran Zhou*, Peter Gyory, Clement Zheng, Patrick C. Shih, Ellen Yi-Luen Do, Malte F Jung, Wendy Ju, and Daniel Leithinger. 2024. Wizard of Props: Mixed Reality Prototyping with Physical Props to Design Responsive Environments. In Proceedings of the Eighteenth International Conference on Tangible, Embedded, and Embodied Interaction (TEI '24). Association for Computing Machinery, New York, NY, USA, Article 47, 1–15. https://doi.org/10.1145/3623509.3633395 (*equal contribution)
Our bodies mediate every interaction with technology, yet—as soma design and feminist HCI remind us—the body is not a neutral canvas. We introduce and examine felt asymmetries—somaesthetic experiences of difference in the body—as a site for generative and critical engagement in interaction design. Through an autobiographical design exploration, and a series of somatic explorations with nine designers including individual inquiries and workshops, we sensitised to, articulated, and shared personal experiences of asymmetry. We draw from these explorations to contribute: (1) Opening a design space exploring the aesthetics of felt asymmetries; (2) Reflections on engaging with asymmetry in design, e.g. as a design material, an estrangement activity or doorway into intimate experience; (3) Considerations for creating technologies that resonate with, rather than erase, the asymmetries of lived experience. We argue that bodily asymmetries are not only to be accommodated in design, but embraced as aesthetic resources—sources of joy, tension, and creativity.
Alice C Haynes, Laia Turmo Vidal, Andreas Lindegren, Ran Zhou, Alejandra Gómez Ortega, Joo Young Park, Anna Brynskov, Hannah Johnson, Kristina Höök. 2026. Aesthetics of Felt Asymmetry. In Proceedings of the 2026 CHI Conference on Human Factors in Computing Systems (CHI '26). Association for Computing Machinery, New York, NY, USA, Article 561, 1–17.
https://doi.org/10.1145/3772318.3791749 Best Paper Award Honorable Mention
Qualities of Physical, Everyday, Interactive Things: an Exploration of Keys
Daily interactions with things are becoming increasingly virtual and hidden, tucked away in minimalist UI’s or dependent on clear voice commands. Motivated by a love for physical interactions, this work uses keys, a mundane, everyday technology, as our object of study, identifying what is being ‘designed away’ in the process of digitalization. This is achieved through a collection of found objects, material samples, and design probes. We present a visual exhibition in pictorial format, where each piece represents material qualities of physical, interactive artefacts. We conclude by discussing how the embodied qualities of these artifacts can be extended to the broader landscape of everyday physical things. Our work contributes to the TEI community through both the tangible artifacts and the identified qualities for designing future physical, everyday, interactive things.
Andreas Lindegren, Ran Zhou, Mafalda Gamboa, Katerina Koleva, and Ylva Fernaeus. 2026. Qualities of physical, everyday, interactive things: an exploration of keys. In Proceedings of the Twentieth International Conference on Tangible, Embedded, and Embodied Interaction (TEI '26). Association for Computing Machinery, New York, NY, USA, Article 55, 1–15.
https://doi.org/10.1145/3731459.3774488
Cultivating Visualization Literacy for Children Through Curiosity and Play
Fostering data visualization literacy (DVL) as part of childhood education could lead to a more data literate society. However, most work in DVL for children relies on a more formal educational context (i.e., a teacher-led approach) that limits children's engagement with data to classroom-based environments and, consequently, children's ability to ask questions about and explore data on topics they find personally meaningful. We explore how a curiosity-driven, child-led approach can provide more agency to children when they are authoring data visualizations. This paper explores how informal learning with crafting physicalizations through play and curiosity may foster increased literacy and engagement with data. Employing a constructionist approach, we designed a do-it-yourself toolkit made out of everyday materials (e.g., paper, cardboard, mirrors) that enables children to create, customize, and personalize three different interactive visualizations (bar, line, pie). We used the toolkit as a design probe in a series of in-person workshops with 5 children (6 to 11-year-olds) and interviews with 5 educators. Our observations reveal that the toolkit helped children creatively engage and interact with visualizations. Children with prior knowledge of data visualization reported the toolkit serving as more of an authoring tool that they envision using in their daily lives, while children with little to no experience found the toolkit as an engaging introduction to data visualization. Our study demonstrates the potential of using the constructionist approach to cultivate children's DVL through curiosity and play.
S. Sandra Bae, Rishi Vanukuru, Ruhan Yang, Peter Gyory, Ran Zhou, Ellen Yi-Luen Do, Danielle Albers Szafir 2022. Cultivating Visualization Literacy for Children Through Curiosity and Play. IEEE Transactions on Visualization and Computer Graphics (IEEE VIS 2022) doi: 10.1109/TVCG.2022.3209442.
Demonstrating Shape-Kit: A Design Toolkit for Crafting On-Body Expressive Haptics
Ran Zhou, Jianru Ding, Chenfeng Gao, Wanli Qian, Benjamin Erickson, Madeline Balaam, Daniel Leithinger, and Ken Nakagaki. 2025. Demonstrating Shape-Kit: A Design Toolkit for Crafting On-Body Expressive Haptics. In Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA '25). Association for Computing Machinery, New York, NY, USA, Article 716, 1–6. https://doi.org/10.1145/3706599.3721280 Jury's Choice Best Demo Honorable Mention
Demonstrating TactorBots: A Haptic Design Toolkit for Exploration of Emotional Robotic Touch
Ran Zhou, Zachary Schwemler, Akshay Baweja, Harpreet Sareen, Ca
sey Lee Hunt, and Daniel Leithinger. 2023. Demonstrating TactorBots: A Haptic Design Toolkit for Exploration of Emotional Robotic Touch . In Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems (CHI EA ’23), April 23–28, 2023, Hamburg, Germany. ACM, New York, NY, USA, 5 pages. https://doi.org/10.1145/3544549.3583897 Jury's Choice Best Demo Award Runner Up
HexTouch: A Wearable Haptic Robot for Complementary Interactions to Companion Agents in Virtual Reality
Ran Zhou, Yanzhe Wu, and Harpreet Sareen. 2020. HexTouch: A Wearable Haptic Robot for Complementary Interactions to Companion Agents in Virtual Reality. In SIGGRAPH Asia 2020 Emerging Technologies (SA '20). Association for Computing Machinery, New York, NY, USA, Article 8, 1–2. https://doi.org/10.1145/3415255.3422881
HexTouch: Affective Robot Touch for Complementary Interactions to Companion Agents in Virtual Reality
Ran Zhou, Yanzhe Wu, and Harpreet Sareen. 2020. HexTouch: Affective Robot Touch for Complementary Interactions to Companion Agents in Virtual Reality. In 26th ACM Symposium on Virtual Reality Software and Technology (VRST '20). https://doi.org/10.1145/3385956.3422100
Best Demo Award
EmotiTactor: Emotional Expression of Robotic Physical Contact
Ran Zhou and Harpreet Sareen. 2020. EmotiTactor: Emotional Expression of Robotic Physical Contact. In Companion Publication of the 2020 ACM Designing Interactive Systems Conference (DIS' 20 Companion). Association for Computing Machinery, New York, NY, USA, 151–156. https://doi.org/10.1145/3393914.3395891
HRI and UIST: Designing Socially Engaging Robot Interfaces
Pragathi Praveena, Arissa J. Sato, Amy Koike, Ran Zhou, Nathan Thomas White, and Ken Nakagaki. 2024. HRI and UIST: Designing Socially Engaging Robot Interfaces. In Adjunct Proceedings of the 37th Annual ACM Symposium on User Interface Software and Technology (UIST Adjunct '24). Association for Computing Machinery, New York, NY, USA, Article 115, 1–3. https://doi.org/10.1145/3672539.3686705
Electro-actuated Materials for Future Haptic Interfaces
Daniel Leithinger, Ran Zhou, Eric Acome, Ahad Mujtaba Rauf, Teng Han, Craig Shultz, and Joe Mullenbach. 2023. Electro-actuated Materials for Future Haptic Interfaces. In The 36th Annual ACM Symposium on User Interface Software and Technology (UIST ’23 Adjunct), October 29–November 01, 2023, San Francisco, CA, USA. ACM, New York, NY, USA, 3 pages. https://doi.org/10.1145/3586182.3617434