
Tactorbots
A Haptic Design Toolkit for Exploration of Emotional Robotic Touch
OPEN-SOURCE TOOLKIT
Feel free to email me if you need more information about our open-source toolkit.
TactorBots is a haptic toolkit to empower designers to explore emotional robotic touch. It contains eight plug-and-play wearable tactor modules that render a series of social gestures in a machinery way. Our specialized web GUI allows easy control, modification, and storage of tactile patterns to support fast prototyping. Taking emotional haptics as a "design canvas" with broad opportunities, TactorBots is the first "playground" for designers to try out various tactile sensations, feel around the nuanced connection between touches and emotions, and come up with creative imaginations.
This work is inspired by the psychological findings that humans can convey specific emotions (e.g., anger, fear, happiness) to each other using social touch patterns. For instance, we humans usually squeeze another person's arm with trembling when we are afraid. This discovery of emotional haptics opens up a new opportunity for our designers to enrich our work with more meaningful, connecting, and engaging interactions. However, nowadays' haptic design is mainly restricted to vibration, which is challenging to render the versatility of the touch that a human's hand can perform. After several iterations and evaluations, we design TactorBots that can render nine robotic gestures (tremble is controlled by parameter setting) driven by low-cost, lightweight micro servos. We carefully design the platform's user experience and open the source, which invites and enables designers with no expertise in engineering or haptics to create rich touch patterns that convey expressive signals.



"It was magical to feel the tactor moving for the first time."
"I had never felt anything like that on my body before."
"I was just surprised how it provided these emotions that I didn’t think were possible."
"The plug-and-play feature of the toolkit was simple to operate, the software was beautiful and the user flow was slick and intuitive."
“The raised dots on Rub Tactor reminded me of spines on a cat’s tongue.”
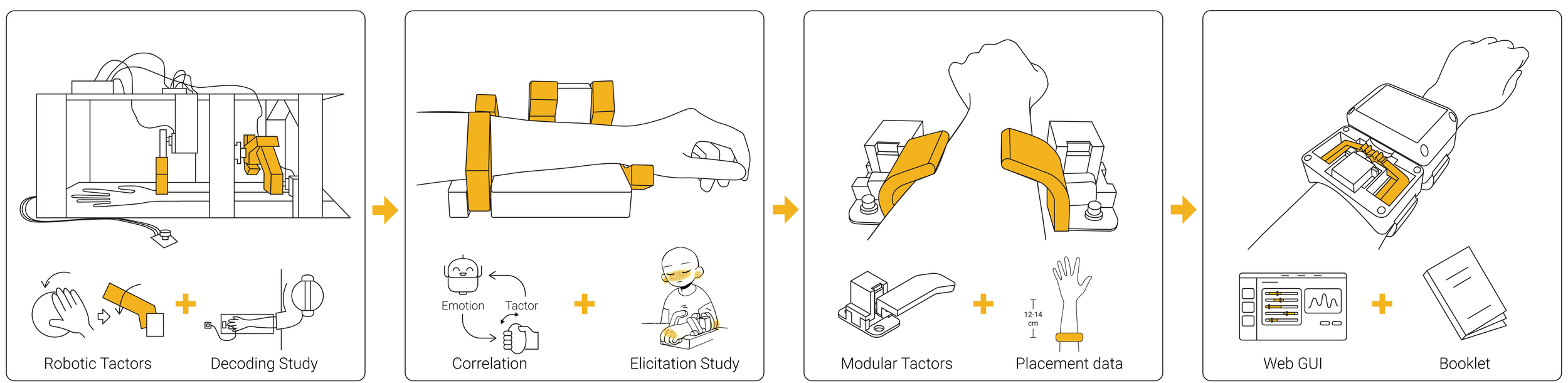
DESIGN JOURNEY
We have gone through a series of iterations and evaluations before arriving at TactorBots. More details about each step can be found in the followings:
TACTORBOTS SYSTEM DESIGN
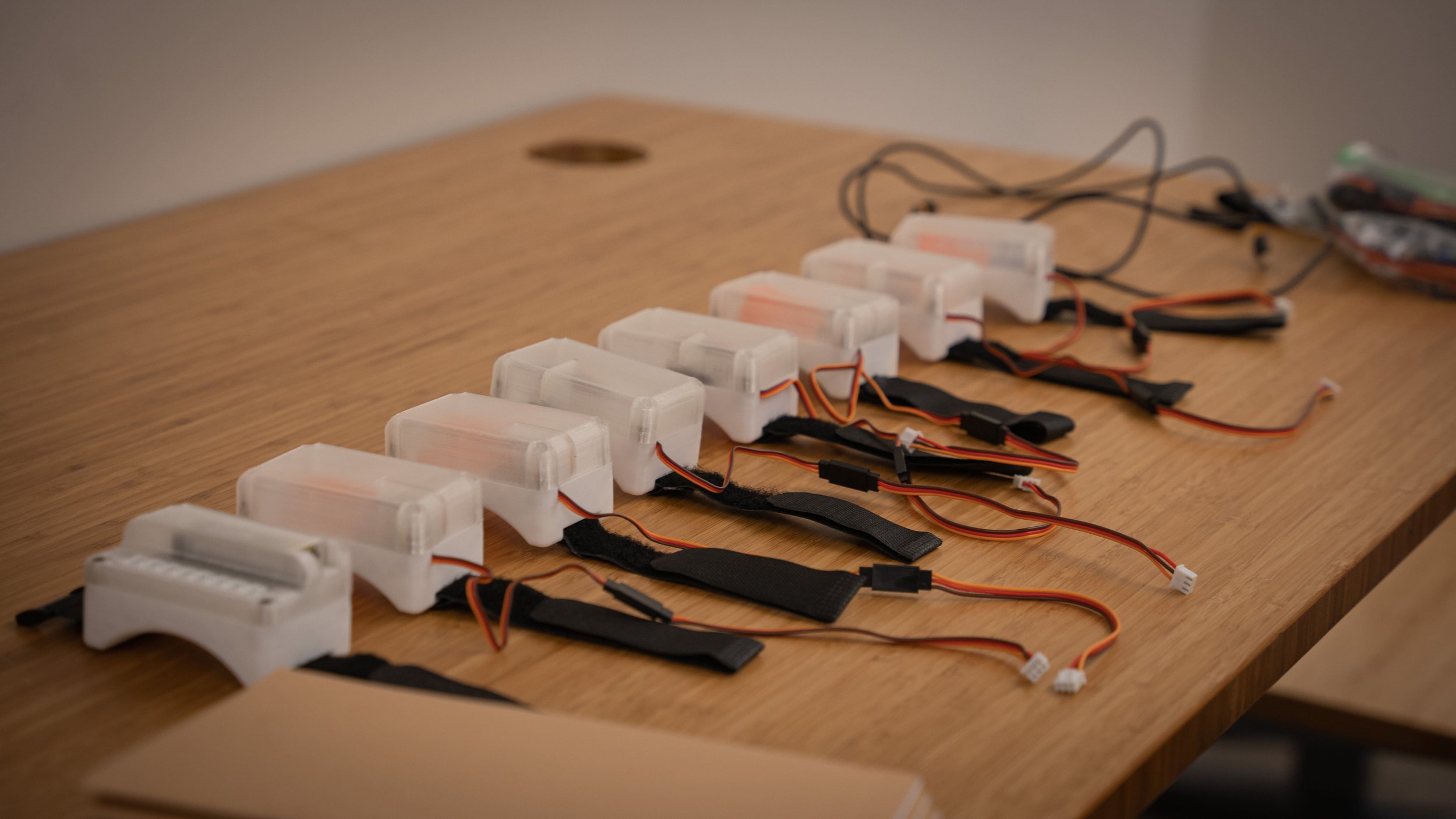
Rub and Stroke Modules

Force Feedback Modules

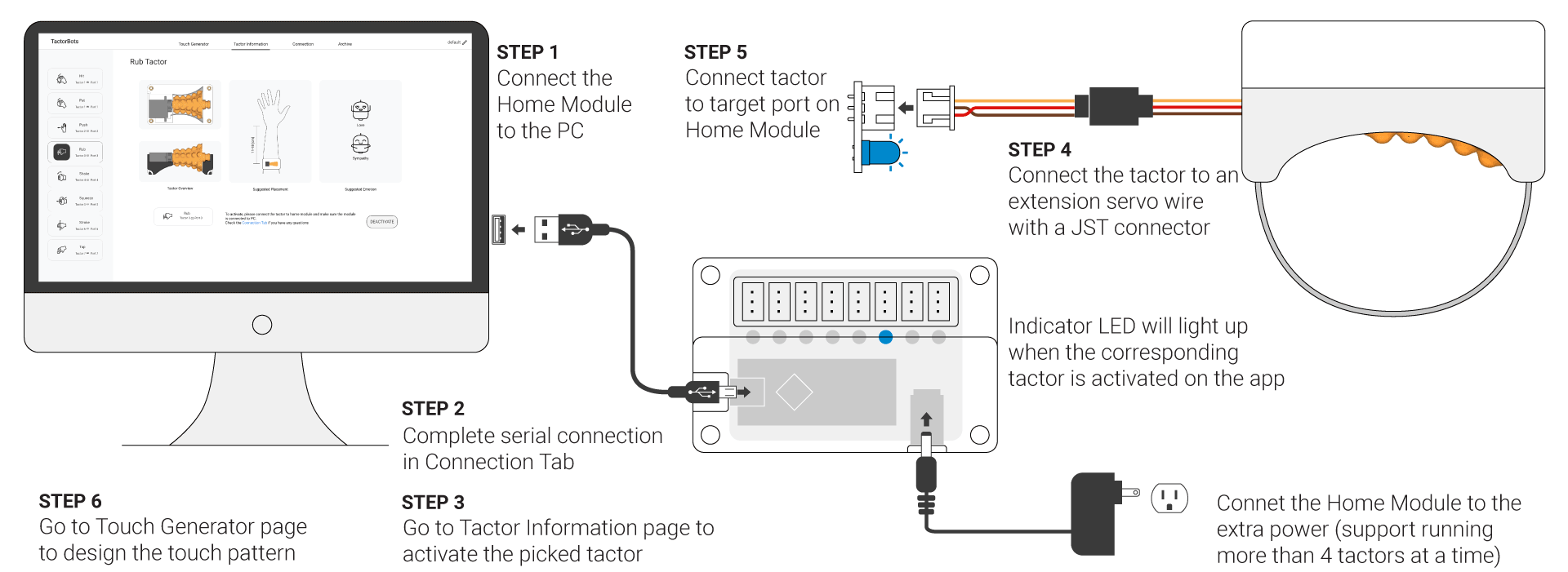
Home Module

Home Module hosts our custom open-source control board compatible with Arduino Nano and Wifi or Bluetooth shields for wireless control. The module features 8 JST connector ports (with indicator LED) to plug in the wearable tactor modules. When driving more than 4 modules simultaneously, an external 5V 3A power supply is connected.
User Flow
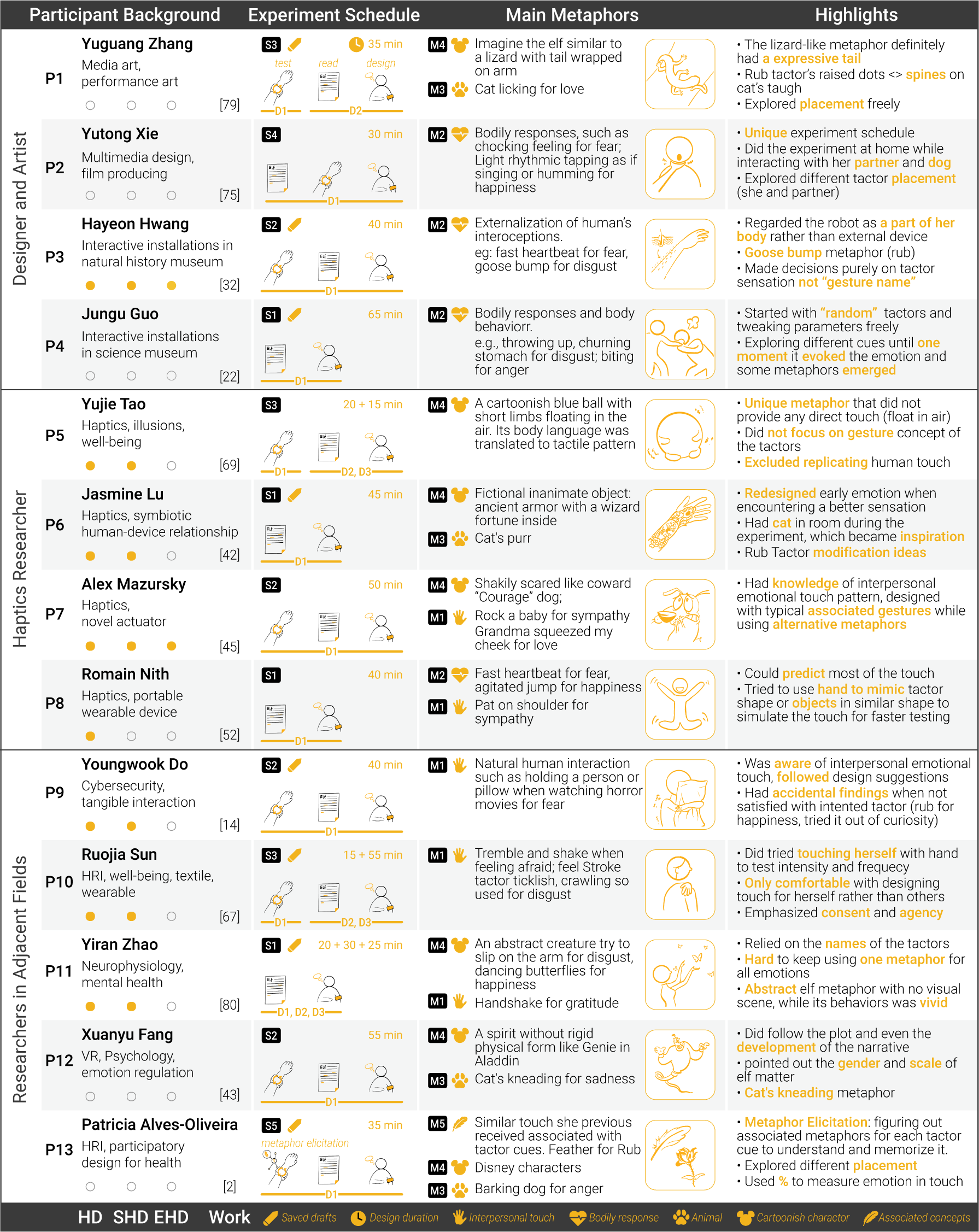
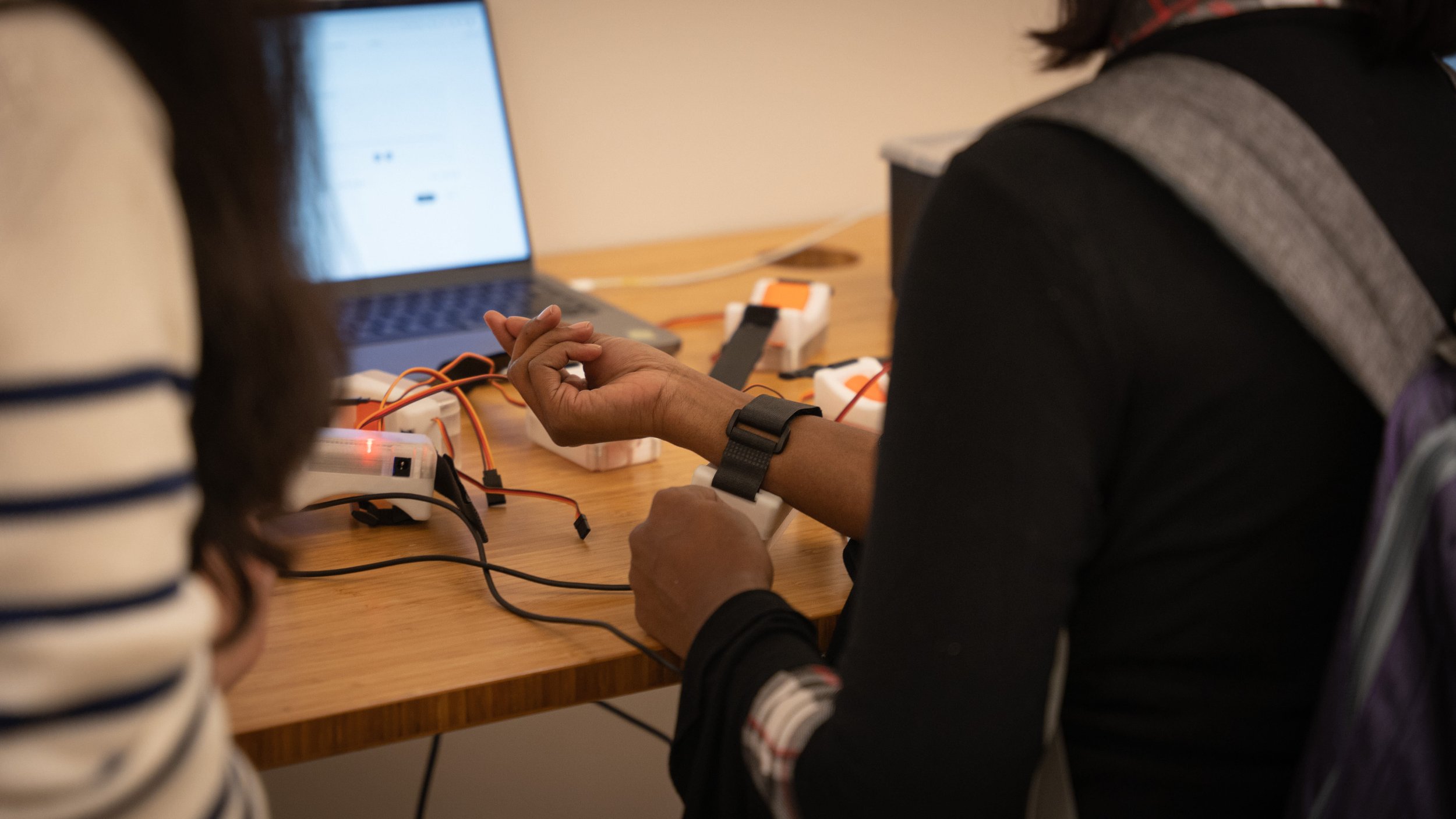
OUT-OF-LAB DESIGN EXPLORATION
We conducted a longitudinal out-of-lab design exploration to probe the design space of emotional haptics and characterize TactorBots’ design experience. We deployed TactorBots to a group of designers, artists, and researchers. Our study focused on collecting participants’ design experience to gain insights into potential overlaps and differences in their practices (what), inquire about their design process and strategy in detail (how), and analyze the reasoning behind design decisions (why). More details can be found in our paper at CHI 2023.
Procedure

FINDINGS
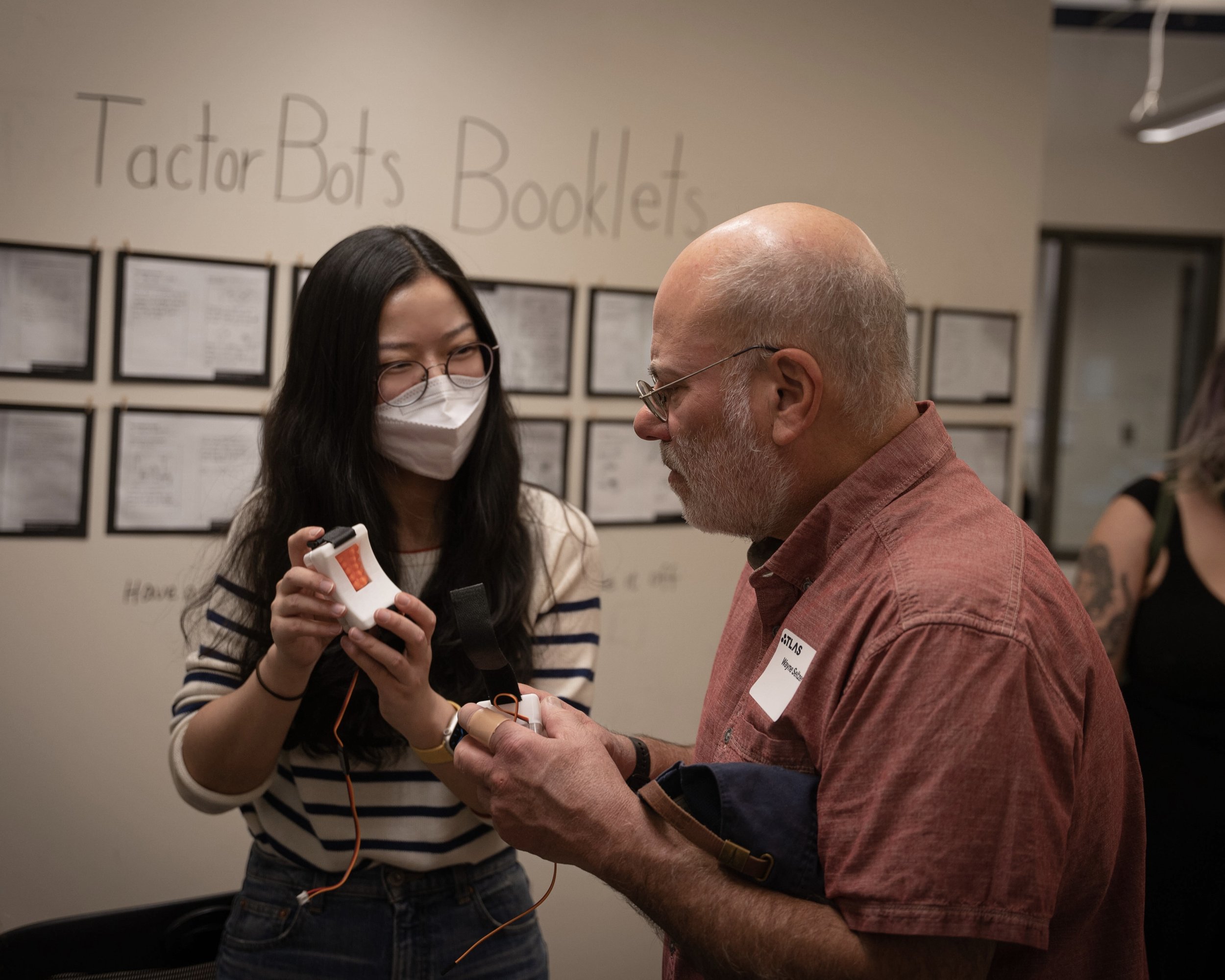
Co-speculation with BOOKLET
TactorBots Booklet is designed for a co-speculation exploration on envisioning the future of emotional haptics. The booklet has two sessions: “Applications for TactorBots” and “Future Applications for Emotional Robotic Touch.” For each session, we provide three example scenarios and two blank blocks. The example scenarios are presented with sketches, brief descriptions, and prompt questions for collecting comments. They are designed for sharing our ideas with co-speculators to start the conversation. They also work as references or precedents to encourage brainstorming. Between the two sessions, there is a body map for collecting the appropriate placement of the robotic touch. Co-speculators’ ideas that emerged in our generative discussion covered the realms of performance art, companion agent, entertainment, accessibility, security, and human well-being. We are curating a digital gallery to exhibit the booklet results and our analysis.

exhibition
2022.10.21 ATLAS Research Open House, Boulder, CO





TEAM
Ran Zhou - Lead Researcher, System Designer
Zachary Schwemler - Industrial Designer
Harpreet Sareen - Researcher
Akshay Baweja - Hardware & Software Developer
Casey Hunt - Software Developer
Daniel Leithinger - Advisor
AWARDS
Finalist - IxDA’s 2023 Interaction Awards
Honorable Mention - Fast Company’s 2022 Innovation by Design Award
Best Demo Award Runner Up - CHI 2023


PUBLICATION
Ran Zhou, Zachary Schwemler, Akshay Baweja, Harpreet Sareen, Casey Lee Hunt, and Daniel Leithinger. 2023. TactorBots: A Haptic Design Toolkit for Out-of-lab Exploration of Emotional Robotic Touch. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI ’23), April 23–28, 2023, Hamburg, Germany. ACM, New York, NY, USA, 19 pages. https://doi.org/10.1145/3544548.3580799
DEMO
Ran Zhou, Zachary Schwemler, Akshay Baweja, Harpreet Sareen, Casey Lee Hunt, and Daniel Leithinger. 2023. Demonstrating TactorBots: A Haptic Design Toolkit for Exploration of Emotional Robotic Touch. Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems. Association for Computing Machinery, New York, NY, USA, Article 438, 1–5. https://doi.org/10.1145/3544549.3583897 Best Demo Award Runner Up